Características
- Compatible con 5 V y 3,3 V (se necesita un solo pin de entrada en Arduino o microcontrolador)
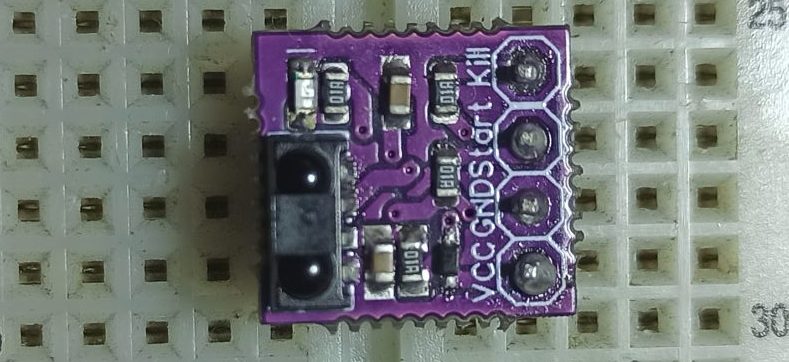
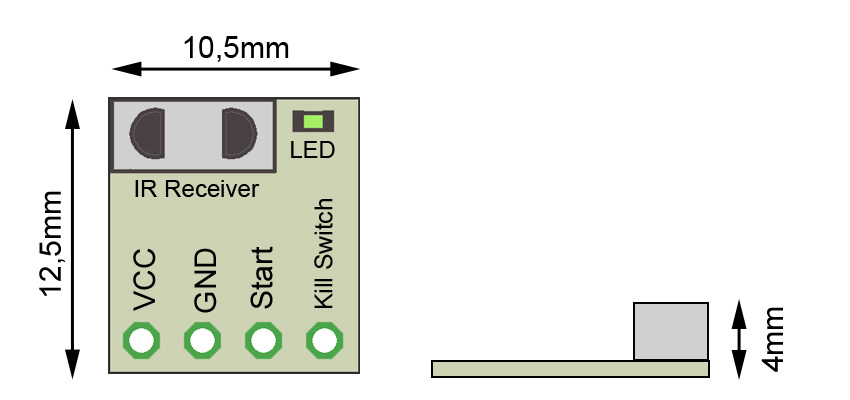
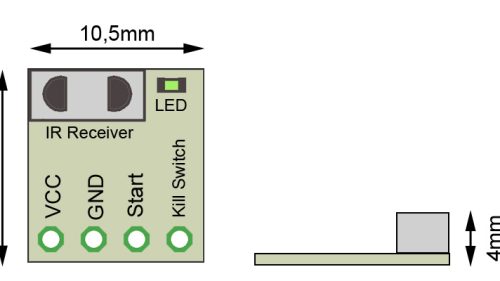
- Tamaño pequeño (10,5 mm x 12,5 mm x 4 mm)
- Fácil de usar y rápido de programar
- Código abierto y hardware abierto
¿Cómo utilizarlo durante las competiciones?
- Primero debes programar el módulo para que reaccione y recuerde un control remoto de árbitro específico.
- Enciende tu robot y luego el árbitro envía una señal de programación (el LED parpadeará 2 veces)
- Ahora el módulo de arranque está listo para recibir señales de arranque y parada (el LED está encendido cuando se inicia y parpadea cuando se detiene).
¿Cómo usarlo al realizar pruebas en casa?
- Primero debes programar el módulo para que reaccione y recuerde el control remoto de prueba.
- Encienda su robot, mantenga el control remoto de prueba cerca del módulo y luego presione el botón de programa “P” (el LED en el módulo parpadeará 2 veces)
- Ahora el módulo de inicio está listo para recibir señales de inicio y parada desde el control remoto de prueba (el LED está encendido cuando se inicia y parpadea cuando se detiene).
El resto de esta página describe el sistema de arranque remoto de la misma manera que podría describirse en las reglas.
El módulo de inicio es un proyecto de código abierto y hardware abierto.
Interruptor de inicio y apagado remoto
Cada ronda comienza cuando el árbitro envía una señal de inicio con un transmisor de infrarrojos. Tan pronto como el robot reciba la señal, comenzará la ronda. (Este método hace que los partidos sean más justos ya que elimina los inicios en falso y también ahorra tiempo ya que se necesitan menos reinicios). El concursante puede optar por implementar todo el hardware y software por sí mismo o simplemente puede utilizar un módulo prediseñado (recomendado).
Interruptor de apagado
El interruptor de apagado se utiliza para cortar la energía a los motores del robot, lo cual se utiliza como medida de seguridad y solo es obligatorio en la categoría de 3 kg. Cuando el árbitro envía la orden de parada, se debe cortar la energía a los motores. El fabricante del robot es responsable de agregar dicho interruptor de apagado al robot por sí mismo, sin embargo, el módulo prefabricado puede proporcionar la señal para activar el interruptor de apagado. A continuación, se pueden encontrar ejemplos de diseño recomendado.
| Clase de robot | 3 kilos | 500 gramos | 100 gramos | 25g |
| Inicio remoto | Obligatorio | Obligatorio | Obligatorio | No aplica |
| Interruptor de apagado | Obligatorio | Opcional | Opcional | No aplica |
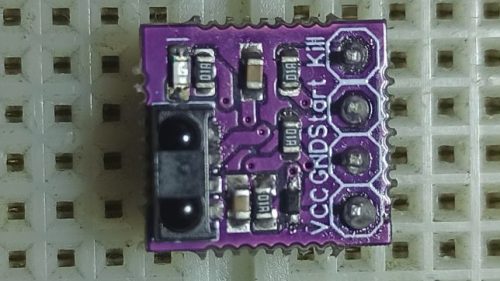
Módulo prediseñado
El módulo prediseñado se encarga de todas las comunicaciones y es muy fácil de implementar. El robot solo necesita esperar a que el pin de inicio del módulo suba y luego debería comenzar. El módulo acepta tensión de alimentación (VCC) de 3,3 a 5 V. Los conectores tienen un paso estándar de 2,54 mm.

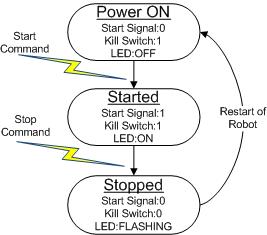
Modos de funcionamiento
La siguiente figura ilustra los modos de funcionamiento del módulo. Para ser menos sensible al ruido y las perturbaciones, el módulo guardará su estado actual en una memoria no volátil y, si se reinicia, volverá al último estado conocido. Esto significa que cada partido finalizará con el árbitro enviando la orden de parada. Nota: Si el LED del módulo está encendido antes de que el árbitro haya enviado el comando de inicio, significa que el módulo está en el estado «Iniciado». Luego se debe enviar el comando de parada y el robot debe reiniciarse para que el módulo vuelva al estado «Encendido».
_V0_02")
Para poder realizar varias partidas una al lado de la otra, cada dohyo tendrá su propio identificador único. El módulo prediseñado se puede reprogramar para escuchar un nuevo identificador. Esto lo hace el árbitro enviando un comando de programación especial que actualiza este identificador.




Valoraciones
No hay valoraciones aún.